Video Inference with DRPAI and GStreamer
MistySOM RZV2L contains the DRPAI hardware module which is able to run artificial Neural Networks
with the focus on low power consumption. To check if this hardware module is present on your device,
you can look for both /dev/drpai0 and /dev/udmabuf0 devices on your Linux shell.
The Userland Direct Memory Access (UDMA) kernel module is required to provide the trained AI model and
the input image to the DRPAI hardware. After activating the hardware, it will use the trained model to
generate the output which can be read by the UDMA module. While DRPAI is running, the running thread will
go to sleep. Of course, the sleep time varies based on the size of the AI model.
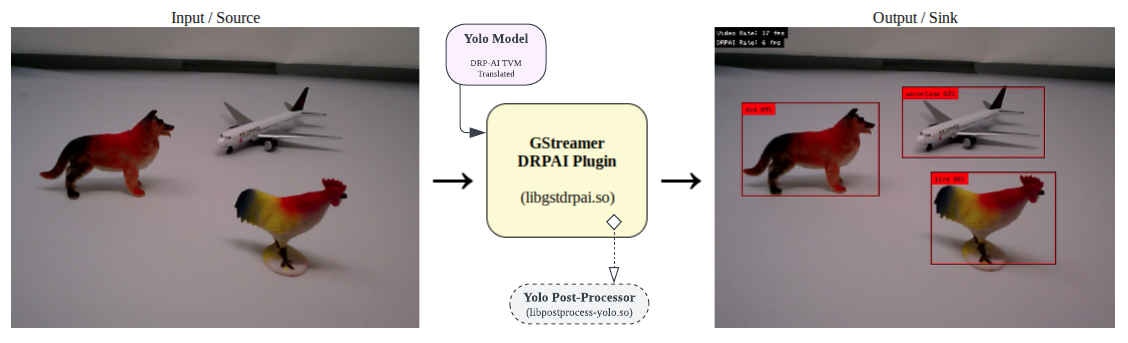
MistyWest team has prepared a GStreamer plugin for DRPAI which can receive any kind of video input, such as a file (filesrc), a network stream (udpsrc), or a camera device (v4l2src) and outputs a video with bounding boxes on inferred objects using the DRPAI. Later, this video can be linked to any kind of output, such as the display (autovideosink), a network stream (udpsink), or a file (filesink).
The plugin uses the following pad template capabilities for both src and sink which requires you
to prepare before your DRPAI element (for example, using a videoconvert element):
video/x-raw
width: 640
height: 480
format: BGR
The plugin also provides you with the following parameters:
General Parameters
| Name | Type | Default | Description |
|---|---|---|---|
| model | String | --- | (Required) The name of the pre-trained model and the directory prefix. |
| multithread | Boolean | true | Use a separate thread for object detection. |
| log-detects | Boolean | false | Print detected objects in standard output. |
| log-server | Host:Port (String) | --- | Address of logs to send in UDP messages in JSON format to the specified port on a remote host. |
| show-fps | Boolean | false | Render frame rates of video and DRPAI at the corner of the video. |
| stop-error | Boolean | true | Stop the gstreamer if kernel modules fail to open. |
| max-video-rate | Float [0.001 - 120] | 120 | Force maximum video frame rate using thread sleeps. |
| max-drpai-rate | Float [0 - 120] | 120 | Force maximum DRPAI frame rate using thread sleeps. |
| smooth-video-rate | Float [1 - 1000] | 1 | Number of last video frame rates to average for a more smooth value. |
| smooth-drpai-rate | Float [1 - 1000] | 1 | Number of last DRPAI frame rates to average for a more smooth value. |
| smooth-bbox-rate | Float [1 - 1000] | 1 | Number of last bounding-box updates to average. (requires tracking) |
Tracking Parameters (YOLO specific)
| Name | Type | Default | Description |
|---|---|---|---|
| tracking | Boolean | true | Track detected objects based on their previous locations. Each detected object gets an ID that persists across multiple detections based on other tracking properties. |
| show-track-id | Boolean | false | Show the track ID on the detection labels. |
| track-seconds | Float [0.001 - 100] | 2 | Number of seconds to wait for a tracked undetected object to forget it. |
| track-doa-thresh | Float [0.001 - 1000] | 2.25 | The threshold of Distance Over Areas (DOA) for tracking bounding-boxes. |
| track-history-length | Integer [0 - 1440] | 60 | Minutes to keep the tracking history. |
Filtering Parameters (YOLO specific)
| Name | Type | Default | Description |
|---|---|---|---|
| filter-show | Boolean | false | Show a yellow box where the filter is applied. |
| filter-class | String | --- | A comma-separated list of classes to filter the detection. Shows all if empty. |
| filter-left | Integer [0 - 639] | 0 | The left edge of the region of interest to filter the detection. |
| filter-top | Integer [0 - 479] | 0 | The top edge of the region of interest to filter the detection. |
| filter-width | Integer [1 - 640] | 640 | The left edge of the region of interest to filter the detection. |
| filter-height | Integer [1 - 480] | 480 | The left edge of the region of interest to filter the detection. |
AI Model
The plugin is implemented in a way that it can run different models. By using the model parameter,
you can switch between different DRP-AI translated models that are located in a directory with
the same name as the model. For example, when using the parameter model=yolov3, and you are running
the command on your home directory /home/user, the plugin loads the TVM compiled model located in
/home/user/yolov3.
MistyWest has already placed compatible yolov2, yolov3, tinyyolov2, and tinyyolov3 models
for you to download from here and extract
into the desired location. For details on how the GStreamer plugin uses them, refer to the next sections.
Model Dynamic Library
Depending on the model you use, even though their input layers are the same, their output layers can be
very different and require additional post-processing to interpret the array of floating point numbers
to a data structure that is used to render the bounding boxes for each inferred object. Therefore,
the plugin uses a shared library that needs to be included with the model and its path is mentioned in
the {model}/{model}_process_params.txt file like this:
[dynamic_library]
libgstdrpai-yolo.so
.
.
.
Yolo Dynamic Model Library (libgstdrpai-yolo.so)
The plugin already includes a dynamic library that supports yolov2, yolov3, tinyyolov2,
and tinyyolov3 models. This dynamic library leverages many similarities between these models and
switches its behaviour based on other parameters that are mentioned in {model}/{model}_process_params.txt
file such as the [best_class_prediction_algorithm] and [anchor_divide_size].
The library also loads the list of all class labels in {model}/{model}_labels.txt and the list of all
box anchors in {model}/{model}_anchors.txt. This means these 3 files need to be manually included
alongside the output of the DRPAI TVM translator.
If you want to use a model that is not following the output layer format for Yolo models, it is possible to write your own post-processor library. Please refer to the plugin's source code.
Some examples of running GStreamer with the DRPAI
Read Camera and Show on Screen
gst-launch-1.0 v4l2src device=/dev/video0 \
! videoconvert \
! drpai model=yolov3 show-fps=true log-detects=true smooth-video-rate=30 \
! videoconvert \
! autovideosink
If your camera supports the BGR format (such as the coral camera), you can modify the camera size in
~/v4l2init.sh (with ov5645_res=640x480) and skip the first videoconvert element like this:
gst-launch-1.0 v4l2src device=/dev/video0 ! video/x-raw, width=640, height=480, format=BGR \
! drpai model=yolov3 show-fps=true log-detects=true smooth-video-rate=30 \
! videoconvert \
! autovideosink
Read Camera and Stream on Network
In case you already have the streaming working based on here, you can
add the drpai element to the stream.sh file like this:
#!/bin/bash
[ $1 ] || { echo "Please specify the destination IP address: ./stream.sh ip" >&2; exit 1; }
./v4l2-init.sh
echo "Streaming to ${1} with DRPAI..."
gst-launch-1.0 v4l2src device=/dev/video0 ! video/x-raw, width=640, height=480, format=BGR \
! drpai model=yolov3 show-fps=true log-detects=true smooth-video-rate=30 \
! vspmfilter dmabuf-use=true ! video/x-raw, format=NV12 \
! omxh264enc control-rate=2 target-bitrate=10485760 interval_intraframes=14 periodicty-idr=2 \
! video/x-h264,profile=\(string\)high,level=\(string\)4.2 \
! rtph264pay config-interval=-1 ! udpsink host=$1 port=51372